
ūŅ┤¾")
ŠSą▐¤o╬’└Ē")

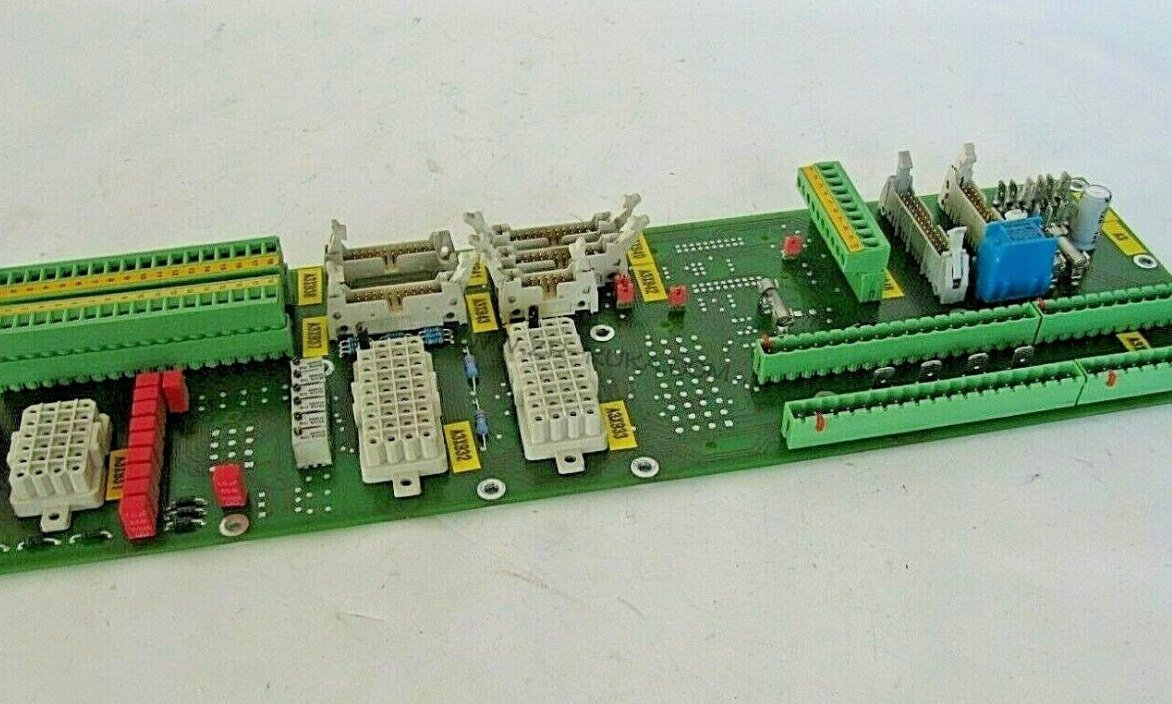
į┌┼ąöÓÄņ┐©ÖCŲ„╚╦PCB░ÕŠSą▐╔Ž──éĆį¬Ų„╝■│÷¼F(xi©żn)╣╩šŽĄ─▀^│╠ųąŻ¼┐╔ęį▓╔╚ĪęįŽ┬ÄūĘNĘĮĘ©üĒ▀Mąąįö╝ÜĄ─╣╩šŽ┼┼▓ķŻ║
╩ūŽ╚╩Ū£yę²─_ļŖē║Ę©ĪŻ▀@ę╗ĘĮĘ©═©▀^Š½├▄£y┴┐Ė„éĆį¬Ų„╝■ę²─_Ą─ļŖē║╦«ŲĮŻ¼üĒ│§▓Į┼ąöÓ╣╩šŽ┐╔─▄░l(f©Ī)╔·Ą─ģ^(q©▒)ė“ĪŻųĄĄ├ūóęŌĄ─╩ŪŻ¼┤╦ĘĮĘ©ļm╚╗─▄ē“╠ß╣®ę╗Č©Ą─ŠĆ╦„Ż¼Ą½▓ó▓╗─▄Š½┤_Č©╬╗ĄĮŠ▀¾wĄ─╣╩šŽ³cŻ¼ę“×ķėąą®ę²─_Ą─Ę┤æ¬┐╔─▄▓╗ē“ņ`├¶Ż¼╔§ų┴═Ļ╚½ø]ėąĘ┤æ¬ĪŻ«öļŖē║│÷¼F(xi©żn)Ų½ļxĢrŻ¼│²┴╦┐╝æ]įōį¬Ų„╝■▒Š╔ĒĄ─å¢Ņ}Ż¼▀ĆąĶŠ»╠Ķ┐╔─▄╩Ū═Ōć·į¬╝■ōpē─╦∙ę²░l(f©Ī)Ą─▀BµiĘ┤æ¬ĪŻ
Ųõ┤╬╩Ū£y┴┐ā╚(n©©i)▓┐Ą╚ą¦ų▒┴„ļŖūĶĄ─ĘĮĘ©ĪŻī”ė┌╝»│╔ēK▀@ŅÉį¬Ų„╝■Ż¼┐╔ęį└¹ė├╚fė├▒ĒĄ╚╣żŠ▀Ż¼ųę╗£y┴┐ŲõĖ„ę²─_Ą─ā╚(n©©i)▓┐Ą╚ą¦ų▒┴„ļŖūĶŻ¼▓ó┼cś╦£╩ųĄ▀Mąąī”▒╚ĪŻ╚¶£y┴┐ųĄ┼cś╦£╩ųĄ╬Ū║ŽŻ¼ätšf├„įō╝»│╔ēKĀŅæB(t©żi)┴╝║├Ż╗╚¶┤µį┌’@ų°▓Ņ«ÉŻ¼ätęŌ╬Čų°╝»│╔ēKā╚(n©©i)▓┐┐╔─▄ęčĮø(j©®ng)╩▄ōpĪŻ
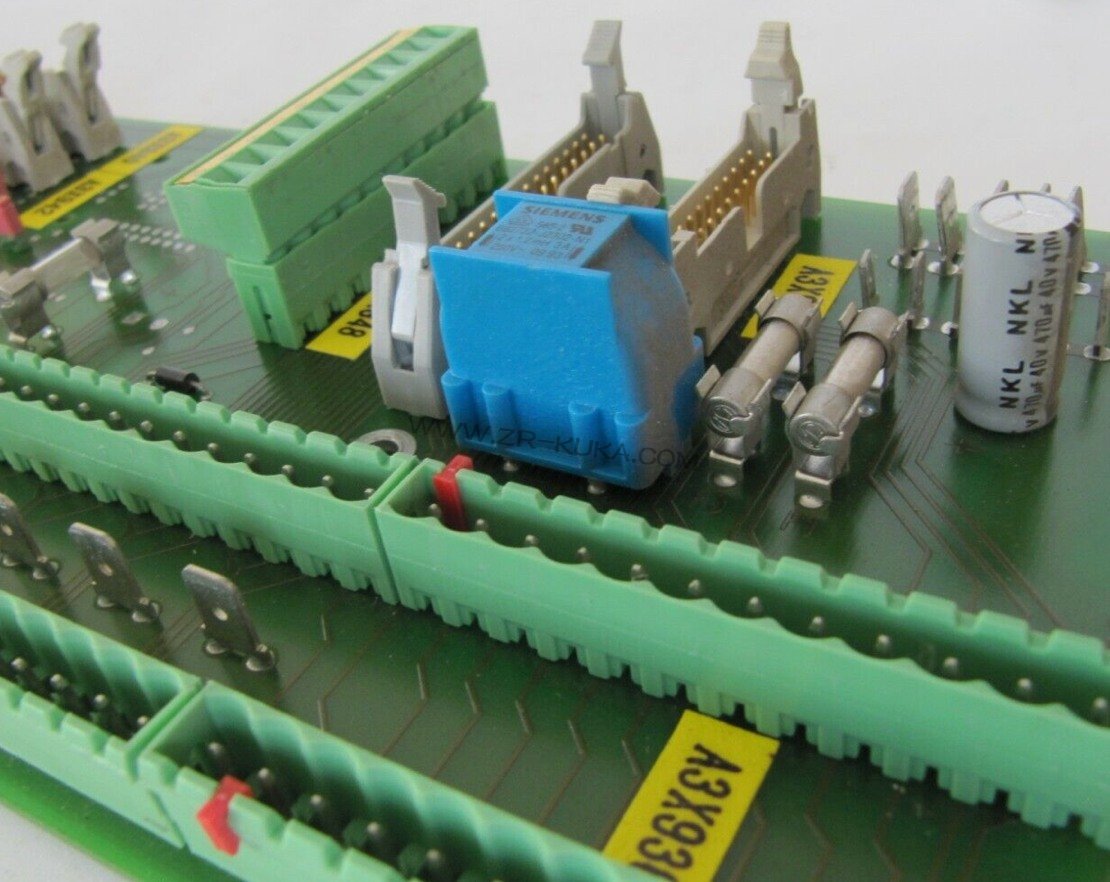
į┘š▀╩ŪÄņ┐©ÖCŲ„╚╦ŠSą▐┼┼│²Ę©ĪŻ├µī”ļŖį┤Č╠┬Ę▀@ŅÉ▌^×ķÅ═ļsĄ─╣╩šŽĢrŻ¼┐╔ęį▓╔╚ĪųéĆęŲ│²┐╔─▄ę²ŲČ╠┬ĘĄ─į¬╝■Ą─ĘĮ╩ĮŻ¼ųę╗┼┼▓ķŻ¼ų▒ų┴Č╠┬Ę¼F(xi©żn)Ž¾Ž¹╩¦ĪŻļm╚╗▀@ĘNĘĮĘ©ŽÓī”║─Ģr▌^ķLŻ¼Ą½į┌╚▒Ę”īŻśI(y©©)įOéõĄ─ŪķørŽ┬Ż¼╦³╚į╚╗╩Ūę╗ĘNąąų«ėąą¦Ą─ĮŌøQĘĮ░ĖĪŻ
▀Ć┐╔ęįĮĶų·īŻśI(y©©)įOéõüĒ▀Mąą╣╩šŽ┼┼▓ķĪŻ╚ń╩╣ė├║┴ÜW▒ĒĄ╚Ė▀Š½Č╚āxŲ„Ż¼─▄ē“Öz£yĄĮļŖ┬Ę░Õ╔Ž╬óąĪĄ─ļŖūĶųĄūā╗»Ż¼Å─Č°čĖ╦┘µiČ©╣╩šŽį¬╝■ĪŻ▀@ĘNĘĮĘ©ąĶę¬īŻśI(y©©)įOéõĄ─ų¦│ųŻ¼Ą½Ųõ┼┼▓ķą¦┬╩ģs▀hĘŪŲõ╦¹ĘĮĘ©╦∙─▄▒╚öMĪŻ
į┌┤_šJÄņ┐©ÖCŲ„╚╦PCB░Õį¬Ų„╝■ōpē─║¾Ż¼ŠSą▐▓Į¾E═¼śėų┴ĻP(gu©Īn)ųžę¬ĪŻąĶę¬ūą╝Ü┤_šJļŖ┬Ę░Õ╣╩šŽĄ─Š▀¾w▒Ē¼F(xi©żn)Ż¼╚ńķ_ÖC¤oĘ┤æ¬Īó▀\ąą▓╗ĘĆ(w©¦n)Č©Ą╚Ż¼▓óšJšµķåūx╣╩šŽ╠ß╩Šą┼ŽóŻ¼ęį▒ŃĖ³£╩┤_ĄžČ©╬╗╣╩šŽ³cĪŻį┌öÓļŖĄ─ŪķørŽ┬ī”ļŖ┬Ę░Õ▀Mąą│§▓ĮÖz▓ķŻ¼┼┼│²ę“ļŖį┤▓ÕŅ^╦╔äėĄ╚═Ō▓┐įŁę“?q©▒)¦ų┬Ą─╣╩šŽĪŻ╚¶ąĶę¬Ė³ōQį¬Ų„╝■Ż¼ätąĶ▀Mąą▓║Ė▓┘ū„Ż¼į┌KUKAÖCŲ„╚╦ŠSą▐┤╦▀^│╠ųąąĶ╠žäeūóęŌ▒ŻūoļŖ┬Ę░Õ╔ŽĄ─Ųõ╦¹į¬╝■║═║Ė▒P▓╗╩▄ōp║”ĪŻĖ³ōQį¬╝■ĢrŻ¼ąĶ£╩┤_ūRäe╣╩šŽį¬╝■Ą─ą═╠¢║═ęÄ(gu©®)Ė±Ż¼▓ó▀xė├║Ž▀mĄ─į¬╝■▀Mąą╠µōQŻ¼═¼Ģr┤_▒Ż░▓čbš²┤_¤oš`ĪŻį┌Ė³ōQį¬╝■║¾▀Mąą╚½├µ£yįćŻ¼┤_▒ŻļŖ┬Ę░Õ─▄ē“š²│Ż╣żū„ŪęĖ„ĒŚąį─▄ĘĆ(w©¦n)Č©┐╔┐┐ĪŻ
į┌ŠSą▐▀^│╠ųąŻ¼▀ĆąĶūóęŌęįŽ┬Äū³cŻ║į┌KUKAÖCŲ„╚╦ŠSą▐Ū░äš▒ž┤_▒ŻÖCŲ„╚╦ļŖį┤ęč═Ļ╚½ĻP(gu©Īn)ķ]ęį▒▄├ŌļŖō¶╩┬╣╩Ż╗Ė³ōQį¬╝■Ģræ¬╩╣ė├┼cįŁį¬╝■ŽÓ═¼ęÄ(gu©®)Ė±║═ą═╠¢Ą─į¬╝■ęį▒ŻūC╝µ╚▌ąį║═ĘĆ(w©¦n)Č©ąįŻ╗į┌▀Mąą▓║Ė║═║ĖĮė▓┘ū„ĢrąĶ╩╣ė├▀m«ö?sh©┤)─╣żŠ▀║═╝╝ąg(sh©┤)ęį▒▄├Ōī”ļŖ┬Ę░Õįņ│╔▓╗▒žę¬Ą─¤ßōpé¹Ż╗Äņ┐©ÖCŲ„╚╦ŠSą▐═Ļ│╔║¾ąĶ▀Mąą╚½├µĄ─╣”─▄£yįćęį┤_▒ŻÖCŲ„╚╦Ą─Ė„ĒŚ╣”─▄Š∙š²│Ż▀\ū„ĪŻ