
���")
�S�ޟo����")

1���C�����cϵ�y(t��ng)���B
����C�����M�̑�(y��ng)��һ������λ���M�п��ƣ�����һ�����C��PLC�����t�@һ����ͨ�^�ⲿ�Ԅ��\�нӿ��M����

PLC�B��
2��ϵ�y(t��ng)�Y(ji��)��(g��u)ԭ��
������KRC4��PLC֮�g�܉�����M��ͨӍ����횝M�������c��
�ⲿ�Ԅ��\�з�ʽ����ԓ�\�з�ʽ����һ�_���C����PLC���ƙC����ϵ�y(t��ng)
CELL.SRC�����ⲿ�x��C���˳���Ŀ��Ƴ�����
PLC�͙C����֮�g����̖���Q����������ݔ���ݔ������̖���ⲿ�Ԅ��\�нӿڣ�
�l(f��)�����C���˵Ŀ�����̖��ݔ��ˣ����_ʼ��ֹͣ��̖������̖�����ϴ_�J
�C���ˠ�B(t��i)��ݔ���ˣ����(q��)���b�à�B(t��i)��λ�������ϵȵȡ�
3�����ⲿ���ӳ���İ�ȫ�֪
�x����CELL������횈�(zh��)��BCO�\����
4���ⲿ���ӵIJ������E
ǰ��l�������\�з�ʽ�ԣ���ԣ���
�����ⲿ�Ԅ��\�е�ݔ��/ݔ���˺�CELL.SRC������������
1.�ڌ�(d��o)�������x��CELL.SRC������CELL����ʼ�K��Ŀ�KRC:\R1��
2.���������O(sh��)����100%�������Ϟ齨�h���O(sh��)��ֵ��Ҳ�ɸ���(j��)��Ҫ�O(sh��)��������(sh��)ֵ����
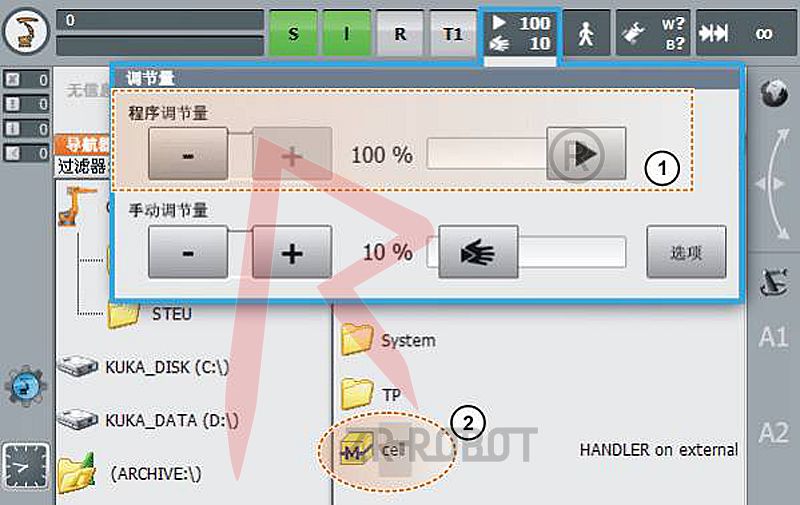
�x��Cell���O(sh��)���քӱ���
1HOV�O(sh��)��
2�x��Cell.src
3.��(zh��)��BCO�\�У���ס�_�J�_�P(gu��n)��Ȼ��ס���Ӱ��I��ֱ����Ϣ���@ʾ“���_BCO”��
4.�x��“�ⲿ�Ԅӻ�”�\�з�ʽ
5.����һ������ϵ�y(t��ng)(PLC)̎���ӳ�����
5��Cell.src���Ƴ���
������PLC��ݔ?sh��)ij���̖�r����Ҫʹ�ÿ��Ƴ���Cell.src��ԓ����ʼ�Kλ���ļ��A“R1”�����c�κγ�Ҋ�ij���һ����Cell����Ҳ�����M�Ђ��Ի��{(di��o)����������Ļ����Y(ji��)��(g��u)��횱��ֲ�׃��
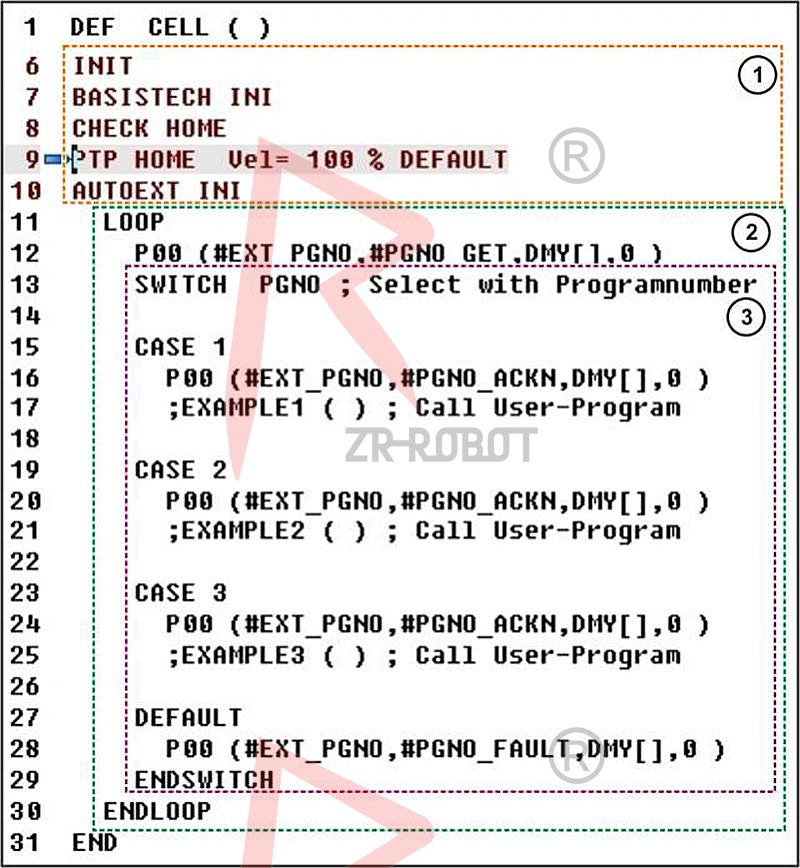
Cell����ĽY(ji��)��(g��u)���ܣ�
1����ʼ����Homeλ��
��ʼ��������(bi��o)����(sh��)
����(j��)“Home”λ�Ùz��C����λ��
��ʼ���ⲿ�Ԅ��\�нӿ�
2���o��ѭ�h(hu��n)��
ͨ�^ģ�K“P00”ԃ������̖
�M���ѽ�(j��ng)�_������̖���x��ѭ�h(hu��n)��
3������̖���x��ѭ�h(hu��n)
����(j��)����̖��������׃��“PGNO”�У����D(zhu��n)������(y��ng)�ķ�֧(“CASE”)�С�
ӛ��ڷ�֧�еęC���˳����\����
�oЧ�ij���̖����(d��o)�³������D(zhu��n)��“Ĭ�J��”��֧����
�\�гɹ��Y(ji��)������Ԅ��؏�(f��)�@һѭ�h(hu��n)��
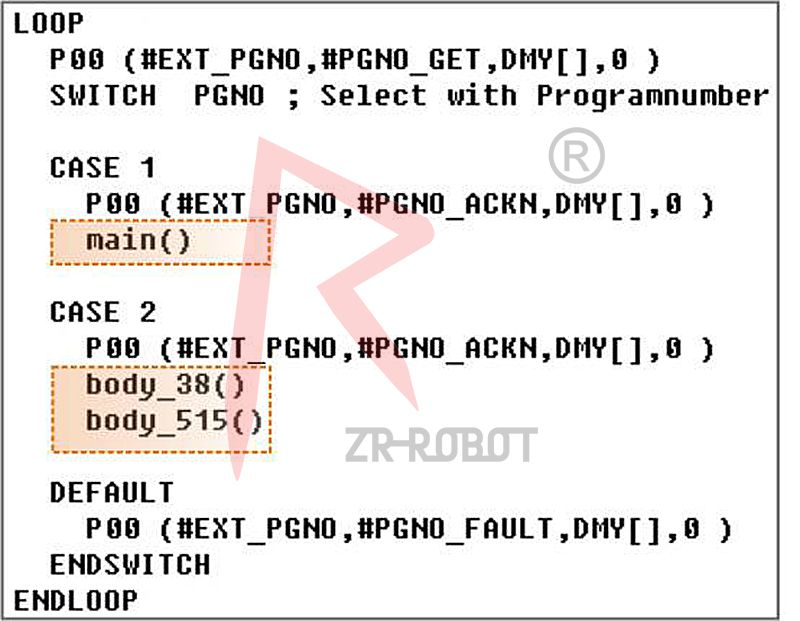
6���������E
1.�ГQ��“����”�Ñ��M
2.���_CELL.SRC��
3.��“CASE”���Ќ����Q“EXAMPLE”�Ñ�(y��ng)������(y��ng)�ij���̖�{(di��o)���ij����
���Q��Q���h�����Qǰ�ķ�̖��
�D11-4:��(j��ng)�m���Cell�����e��
7.�P(gu��n)�]��������ġ�