



�쿨�C������һ�N�V�������ڹ��I(y��)�Ԅӻ��I��������O�����ŷ��(q��)��������C���˵ĺ��IJ���֮һ�������ܺÉ�ֱ��Ӱ푙C���˵Ĺ���Ч����
�ŷ��(q��)������һ�Nͨ�^���܁��Կ���������̖���(q��)��늙C�����A�O��܉�E���ٶ��M���\�ӵ��b�����ڎ쿨�C��������KUKA�Cе��KR500�(q��)����ͨ�����ڿ��ƙC���˵��P��(ji��)�\����
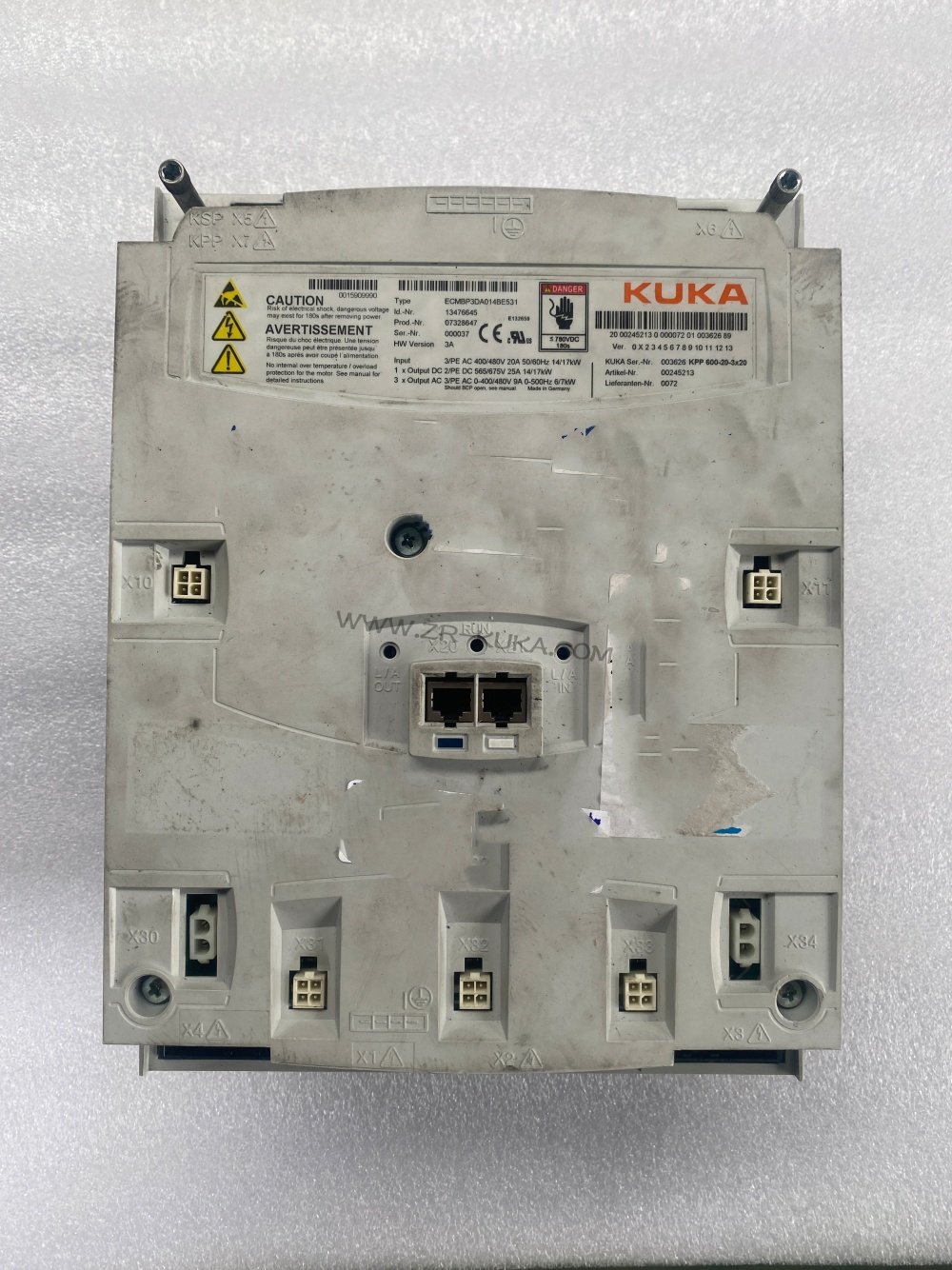
��һ���쿨�Cе���(q��)�������Ϸ���c�\��
1. ���Ϸ��
�ŷ��(q��)��������ͨ�����Է֞�Ӳ�����Ϻ�ܛ��������Ӳ��������Ҫָ�(q��)������(n��i)��Ԫ�����p������·���ϵȣ�ܛ��������Ҫָ����ϵ�y(t��ng)߉�e�`������(sh��)�O�ò���?sh��)ȡ?/span>
2. �����\��
�ھS�ގ쿨�C�����ŷ��(q��)����֮ǰ������Ҫ�������M�Мʴ_�\�������õ��\���������
��1���^�취��ͨ�^�^��KUKA�Cе��KR500�ŷ��(q��)������ָʾ�����@ʾ���Ȳ������Д���������
��2���y������ʹ���f�ñ���ʾ�����ȹ������y���(q��)������늉�����������εȅ���(sh��)���Д���ϲ�λ��
��3����Q���������ƹ��ϵIJ�����Q���µIJ������^������Ƿ��ų����Դ_�����ϲ�λ��
������Ӳ�����ϾS��
1. �Դ����
�Դ�������ŷ��(q��)������Ҋ��Ӳ������֮һ�����ܵĹ���ԭ������Դ�����|�������Դ늉�����(w��n)������Q���������z���Դ���B�����{(di��o)���Դ늉��ȡ�
2. 늙C����
늙C����Ҳ���ŷ��(q��)�����ij�Ҋ����֮һ�����ܵĹ���ԭ�����늙C�^�d���S��ĥ�p�ȡ���Q���������z��늙Cؓ�d�����Q�S�е���
3. ��·����
��·����Ҳ�dz�Ҋ��KUKA�Cе��KR500�ŷ��(q��)��������֮һ�����ܵĹ���ԭ�������·�ϻ�����·��·�ȡ���Q���������z�龀·�B�������Q��·����
���J�C���˳�ҊKUKA�쿨�C���˾S����̖������
�쿨�C����160155�(q��)�������J�C���˾S��
KUKA�Cе��C2�ŷ��(q��)����126385�S��
�쿨�C����C2�(q��)���� KSD1-08�S��
�쿨�Cе��C4�(q��)����KSP600 3X64 UL�S��
KUKA�Cе�� KSD1-16�ŷ�ģ�K 00-122-285�S��
�쿨�C�����ŷ��(q��)����KSP600 3X40 UL�S��
�쿨�Cе��KSP600 3X64�(q��)�������J�C���˾S��