
最大")
維修無物理")

KUKA機器人6 軸零位校準方法( EMT)
一、 手動狀態(tài)T1,在軸坐標系,將機器人1 到6 軸分別移動到其原始零點附近,目測每個軸上的兩個零位觀察缺口要對準。

二、將EMT 安裝在軸1 的校零槽位內(nèi),將另一端連接到機器人底座上的X32 插口

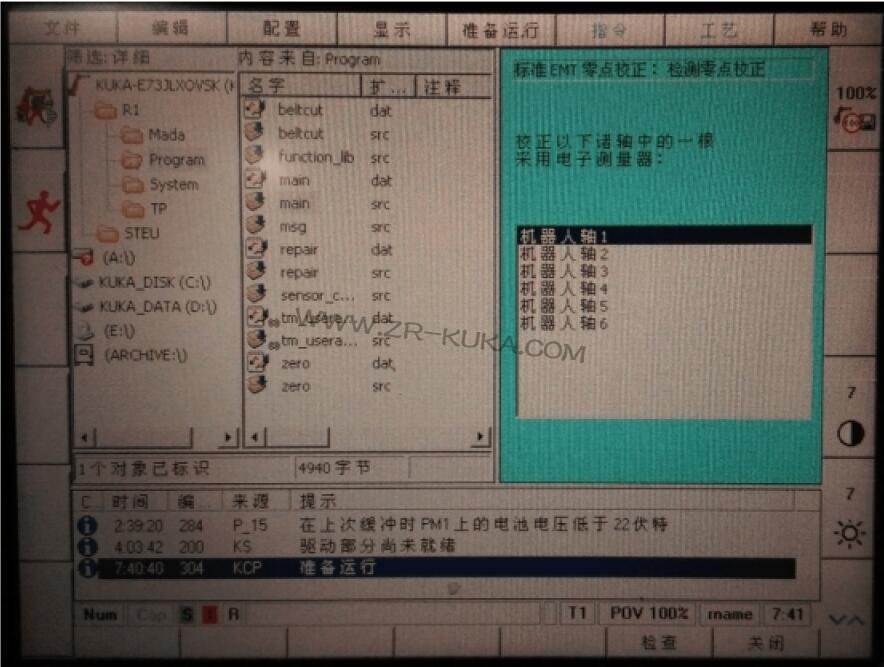
三、 操作KUKA控制手柄,依次選擇如下菜單進入零位校準模式
1. 配置,用戶組
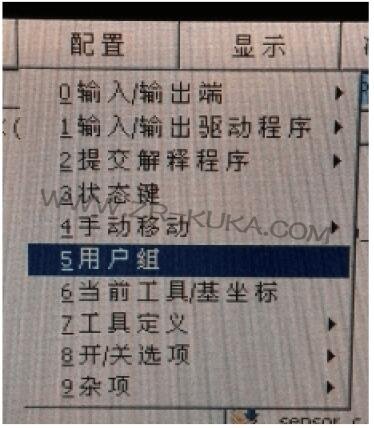
2. 選專家,密碼kuka
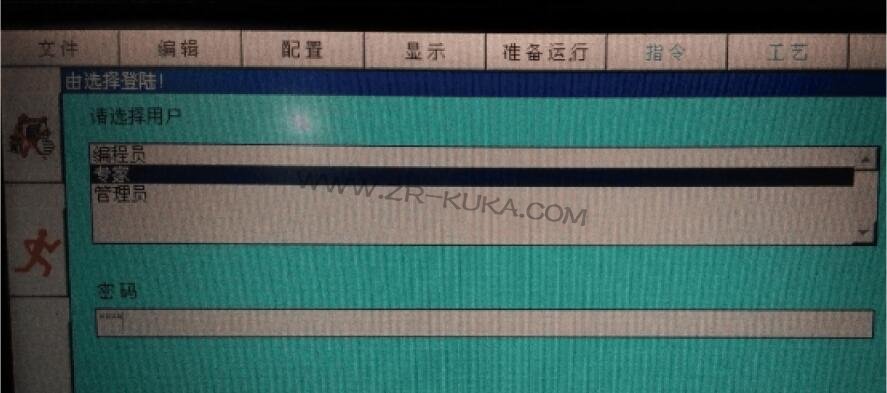
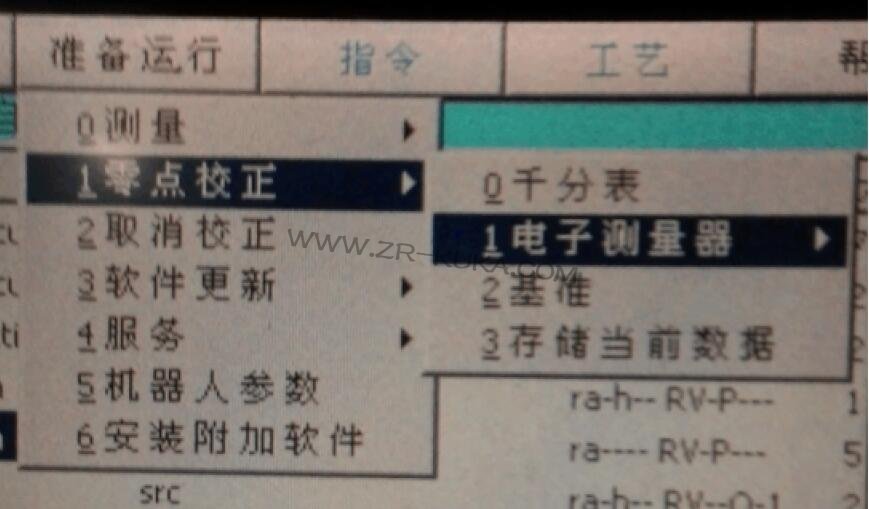
3. 選擇準備運行,零點校正,電子測量器
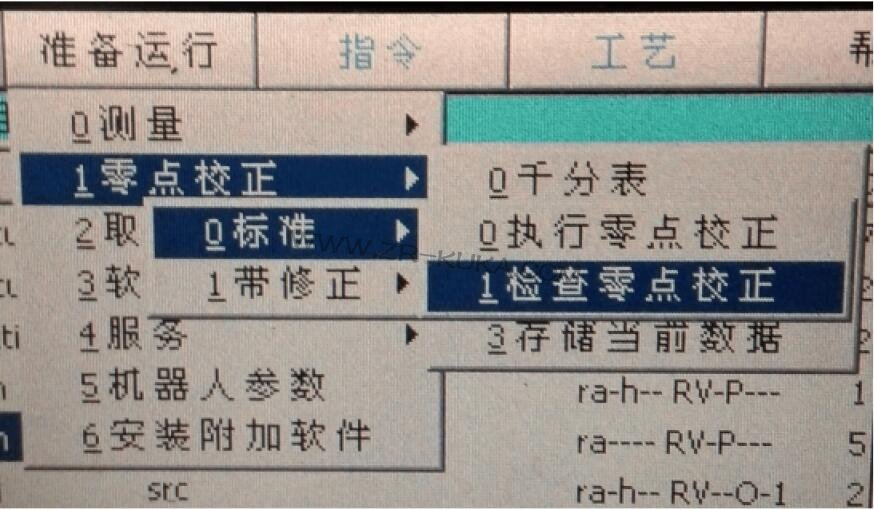
4. 標準,檢查零點校正
5. 選擇機器人軸1,將下方報警欄信息清空,左手按住手柄背面的驅(qū)動按鍵,等驅(qū)動圖標“I變”成綠色,按”檢查“按鈕對應(yīng)的軟鍵,報警欄會出現(xiàn)準備就緒字樣。此時軸1 已經(jīng)開始微動,可以觀察到EMT上的兩個綠色指示燈會由兩個全亮變?yōu)橹挥? 個亮,伴隨著咔嗒一聲,校準結(jié)束。這時如果校準后零位與現(xiàn)零位偏差很小,報警欄直接會顯示”軸1 零位校準結(jié)束“,如果校準后零位與現(xiàn)零位偏差超限,則會在右側(cè)信息欄顯示校準前后的數(shù)據(jù)差別,包括編碼器碼值差和角度差,需要選擇”存儲”后才能完成零位校準。
6. 將EMT移動到軸2 的校零槽位內(nèi),另一端依然連接到機器人底座上的X32 插口;在右側(cè)信息欄選擇機器人軸2,按照上述步驟對軸2 進行零位校準
7. 依次對余下的4 個軸進行零位校準
四。 都較準完畢后,手動模式慢速運行“維修”程序,將機器人打到維修位,觀察行程和位置是否正常,若正常,之后再運行主程序,手動慢速回HOME 點,觀察行程和位置是否正常,若正常,則進行過料測試。
五。 因本次進行零位校準的是KR150割帶機器人,那么在解包系統(tǒng)電控柜操作屏上選擇“啟用KR150機器人”,在機器人KCP上選擇main 程序,自動,啟動,等待自動對煙包割帶,看是否正常。若一切正常,則本次零位校準結(jié)束。