
���")
�S�ޟo����")

�쿨KUKA���S�C���˵����c
�C���˵����c��ָ܉�E���c�g���\�Ӳ���ͨ�^�ѿ���׃�Q���F(xi��n)�����@Щ�c�ĸ��������P���S��Ҫ�M�кܴ�ļ������@�����C���˵��\�ӕ���������ֹͣ���Үa(ch��n)��һ���e�`

һ�� �C����ϵ�y(t��ng)�İ�ȫҪ�أ��������g������
�������g���Ƶķ�ʽ������
ܛ����ʽ�O���S���D�Ƿ���
����ijЩ�S�Ď��о��_���ęCеʽ�Ƅ�
ͨ�^��������׃����$WORKSPACE���� ���O(ji��n)ҕ�C���˵Ĺ�������
§����ܛ�������S1 ��Ϣ��
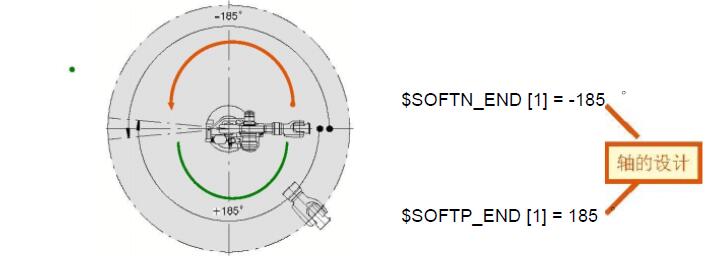
$SOFTN_END [1] = -185 °
$SOFTP_END [1] = 185 °
§������ �C����KR 125 �ϵęCе��λ

һЩ��͵ęC���˰��b�К�Һʽ��Cеʽƽ��ϵ�y(t��ng)��
�≺Һ��ƽ��ϵ�y(t��ng)ֻ���ɾ����S���Ě�Һϵ�y(t��ng)��(j��ng)���ˆT�M�в�����
���Ҫ������Һƽ��ϵ�y(t��ng)�������o���ęC���˲���Ҫ�̶������Է��������Ƅӡ�
�����C����ϵ�y(t��ng)�İ�ȫҪ�أ��ضȱO(ji��n)��
늄әC��ͨ�^�ضȂ��������������d�ɵĴ�С���Ķ���ֹ�^�d�İl(f��)����
늄әC�ڹ����^���Е����������C��Ƥ�w������Ҫע���A��
���ƹ�ăȲ��ض�Ҳ���ܿ��Ƶģ����ضȳ��^�O��ֵ�����������Դ����������
�����C����ϵ�y(t��ng)�İ�ȫҪ�أ�ԇ�\��ģʽ
ԇ�\��ģʽ����ȫ���ܣ������еij�������ԇ�\�е�ģʽ�µ����\����Ȼ�������\����Ҫ�ڰ��I“����”������֮��ſ�������t���C�����Dz����ӵ���

�ġ��C���˵İ�ȫҪ�أ�ʹ�ܰ��I

KUKA ʾ������KCP���ϵ�ʹ�ܰ��I