
�������C(j��)������δ��(l��i)���ژI(y��)���")
е��C4����ϵ�y(t��ng)�S�ޟo(w��)����")
е��KR280�ŷ�늙C(j��)���S�S")
KUKA KL-100���Ի�܉
KUKA ���Ի�܉ KL 100 ��һ��(g��)���b�ڵ������컨����ϵĪ�(d��)�����S���Ի�܉���ڰ��\(y��n)���bж�����ϼӹ����z�y(c��)��z�(y��n)���I(l��ng)��(y��ng)�÷dz��V����
KL 100 ����C(j��)���˵ĸ����S�\(y��n)�����m���� KR AGILUS ϵ�е����ЙC(j��)�������ɴ������ƾ�������(y��ng)�ęC(j��)���˿�����ؓ(f��)؟(z��)��(zh��)����
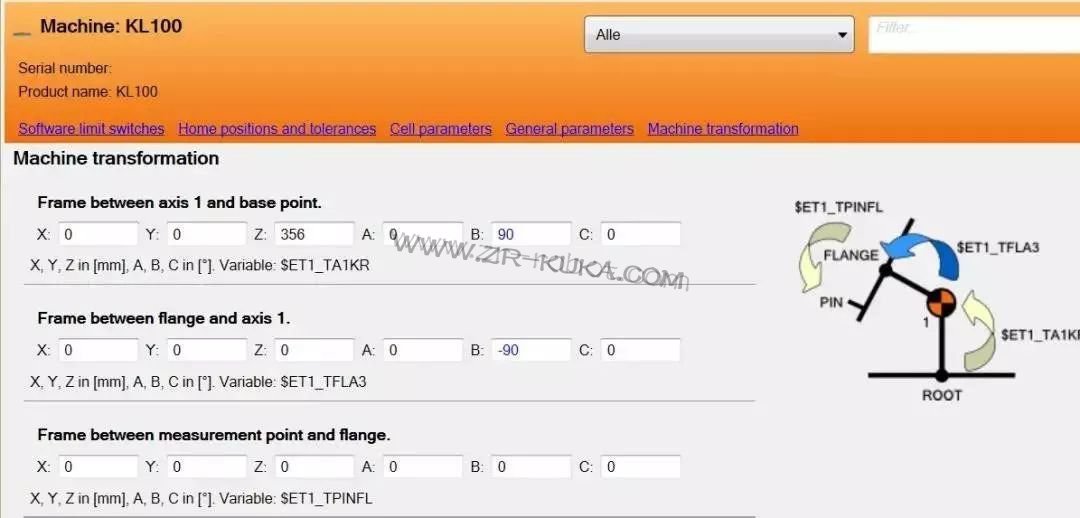
����Ŀ��(bi��o)
��(k��)�� KR AGILUS ϵ���е� KR 6 R700 sixx �C(j��)���˰��b�� KUKA �� KL-100 ��(d��o)܉�������� ROBROOT �\(y��n)��(d��ng)ϵ�y(t��ng)��������ʹֱ����(d��o)܉�͙C(j��)���ˌ�(sh��)�F(xi��n)ͬ��������
ʹ��WorkVisual���þ��Ԇ�Ԫ��So easy↓↓↓
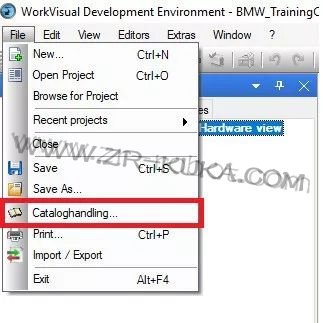
Step 1 �c(di��n)���ļ�→Ŀ䛹���
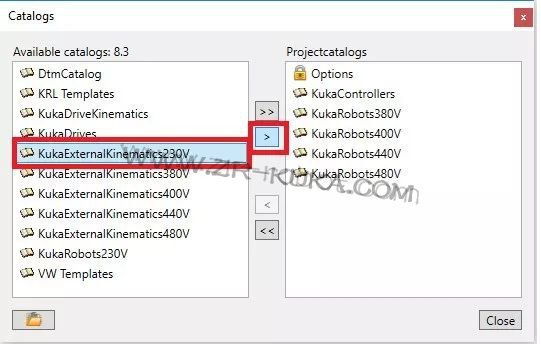
Step 2 �x��KukaExternalKinematics230V �c(di��n)���(g��)���^�����ӵ��F(xi��n)��Ŀ�
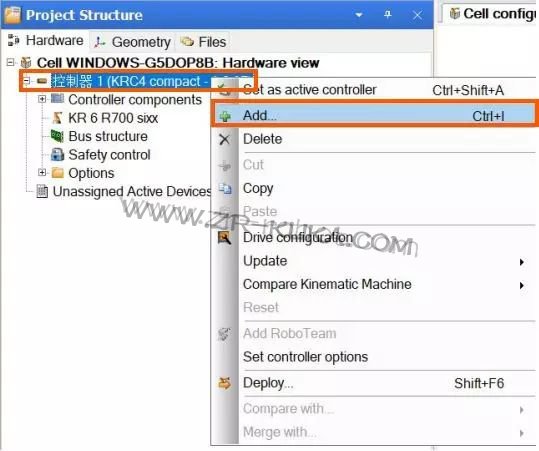
Step 3 ���c(di��n)���(xi��ng)Ŀ�Y(ji��)��(g��u)→����
Step 4 �x��KukaExternalKinematics230V → KL100 → Add
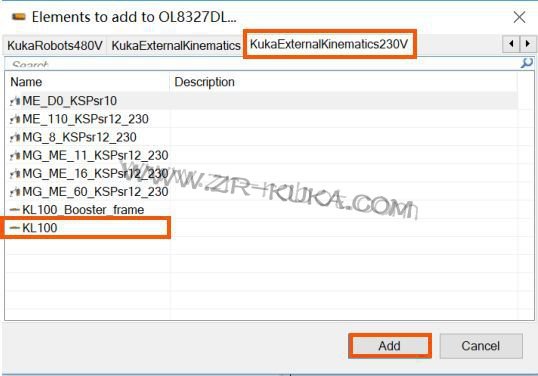
Step 5 KL100�������M(j��n)���(xi��ng)Ŀ�Y(ji��)��(g��u)
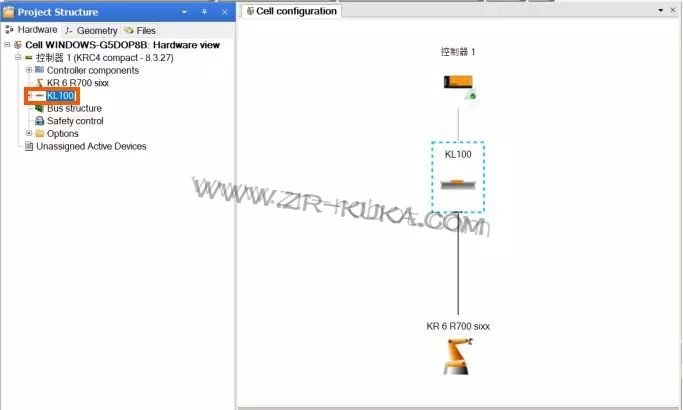
Step 6 ���D(zhu��n)�Q�P(gu��n)ϵ���҈D����KL100�ą���(sh��)�
Step 7 �ٰ��(xi��ng)Ŀ���d���C(j��)���˿��ƹ���
���ܳ��F(xi��n)�Ć�(w��n)�}
������r���Ԇ�Ԫ����Ҫ�eУ��(zh��n)���� WorkVisual ���ú� ROBROOT �\(y��n)��(d��ng)ϵ�y(t��ng)���D(zhu��n)�Q��(sh��)ֵ������
���Еr(sh��)����ʹ��ֱ���S�y(c��)ԇ�ⲿ�\(y��n)��(d��ng)ϵ�y(t��ng)�r(sh��)�����ܹ��ߵ� TCP λ�Õ�(hu��)���F(xi��n)������׃������ijЩ���⑪(y��ng)��Ҫ�����܉�E���ȱ��^�ߵđ�(y��ng)�È�(ch��ng)�����͟o(w��)���_(d��)���͑�Ҫ����[��(d��ng)��(y��ng)�õȣ���
��(w��n)�}����
������r�£��C(j��)���˵� ROBROOT ����(bi��o)ϵ��(y��ng)�c���Ԇ�Ԫ�� FLANGE ����(bi��o)ϵ��ͬ�� ��(sh��)�H����ͨ����(hu��)���F(xi��n)���b�`������(d��o)���@�ɂ�(g��)����(bi��o)ϵ��(hu��)�����p�IJ���@��ζ��ʹ���ⲿ�S�\(y��n)��(d��ng)����(bi��o)ϵ�r(sh��) TCP ��λ�Õ�(hu��)���F(xi��n)ƫ���� ����ڙC(j��)���˿������ﰲ�b�� KSS 8.3���t����ͨ�^(gu��)���Ԇ�Ԫ�� Offset У��(zh��n)����(l��i)��(du��)�@Щ��M(j��n)��ʾ��У����
ͬ�Ӳ����z©���������M(j��n)�о��w����ǰ����Ҫ�_���ļ��£�
1. ����WorkVisual���ú����P(gu��n)�ⲿ�S�� ������d���C(j��)���˿������С�
2. ��ǰУ��(zh��n)�^(gu��)�Ĺ��߰��b�ڰ��b���m����
3. �](m��i)�д��_(k��i)���x���κγ�����
4. T1ģʽ