
�I(y��)�Ї�������ǰҹ �l��")


��һ��������XIP���ij�
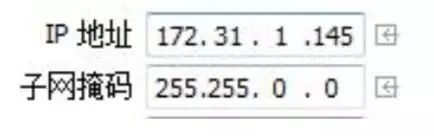
����ͬһIP��(n��i)������
�ڶ��������W(w��ng)������X�͙C�����B��
�����������_Workvisualܛ��(���º��QWVܛ��)
ܛ�����_�����D1��ʾ��
�D1��WVܛ�����_����
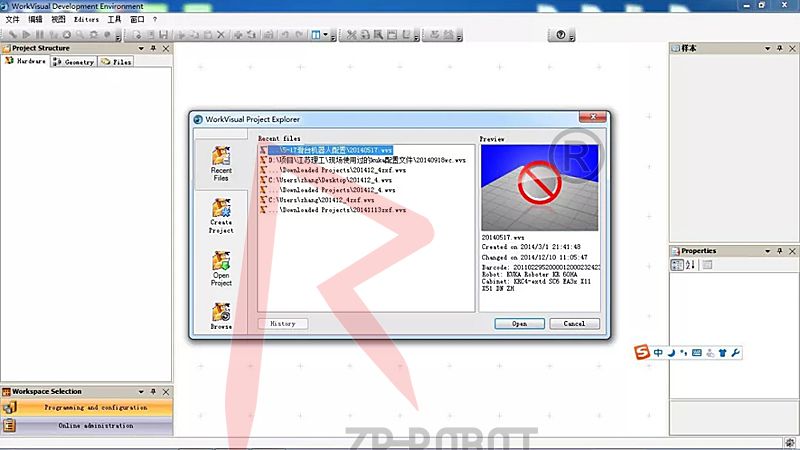
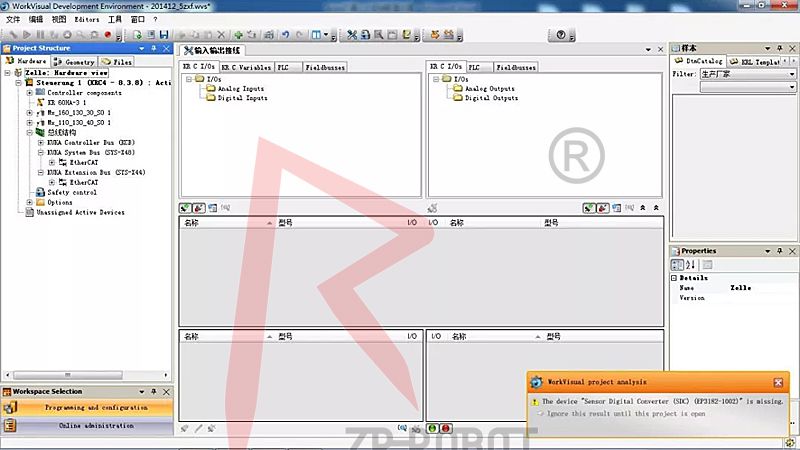
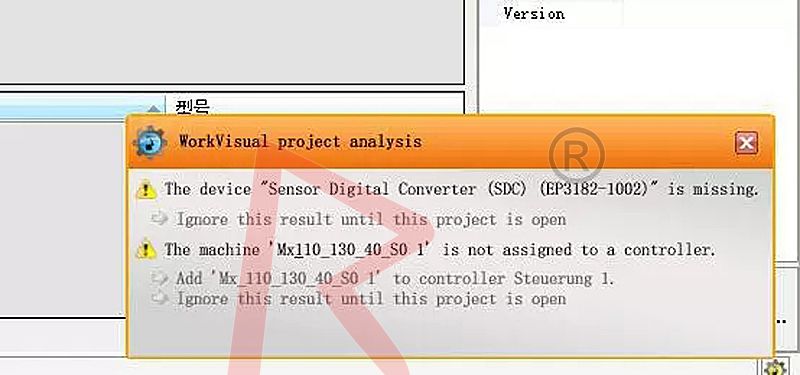
��WVܛ���Ĵ�������D2��ʾ
�D2�Ŀ�ļ��x��
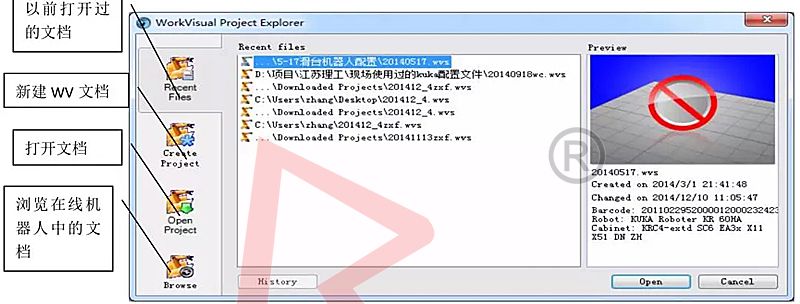
���x��Browse�r��������D3��ʾ
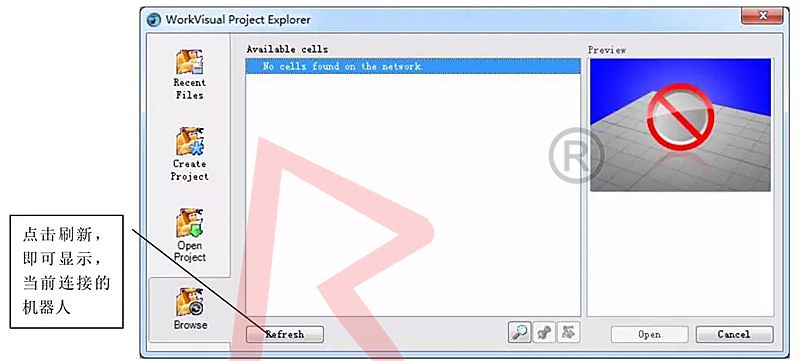
�D3
���_VW�ļ�����������D4��ʾ
�D4
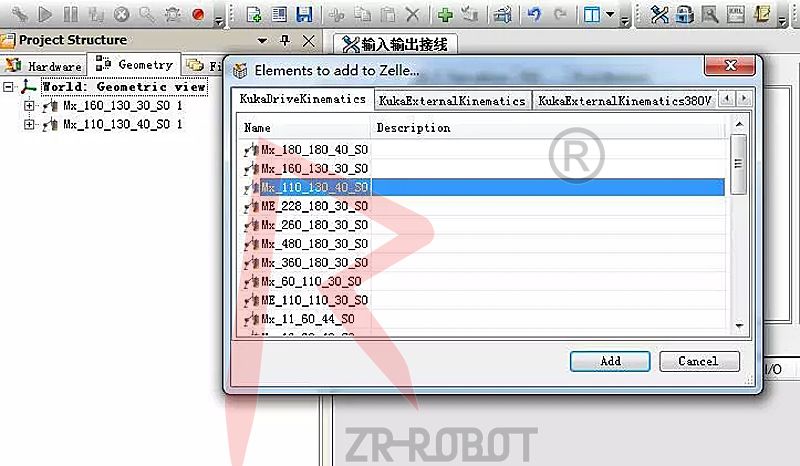
���IJ��������ⲿ�S�c�C����̖����D5�����c�C��Art-Nr̖������(y��ng)
kuka�ļ�
����늙C����̖

�D5
����D5�е�늙Cӆ؛̖����λ��121216������kuka�ļ�����D6���ɲ��늙C��̖��MX_110_130_40_S0
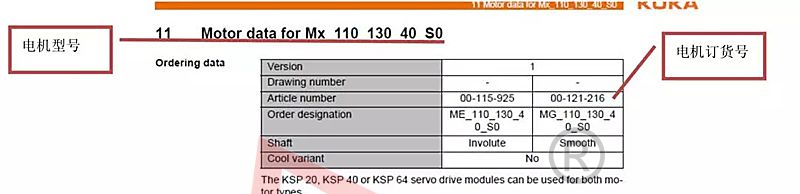
�D6
���岽���F(xi��n)���_ʼ�����ⲿ�S����kuka�C�����Ѓɂ��ⲿ�Sϵ�y(t��ng)�r��ԭ�t��������ֱ����(d��o)܉�ⲿϵ�y(t��ng)���������D(zhu��n)�S�ⲿϵ�y(t��ng)����������ʾ���ľ���ֱ����(d��o)܉�ⲿ�S��
�Γ�geometricview����ғ�����Mx_110_130_40_S0����D7
�D7�����ⲿ�S늙C
��������KR60HA_3�ϵ�MX_60_110_30_S0��FLANGEBASE��������D8
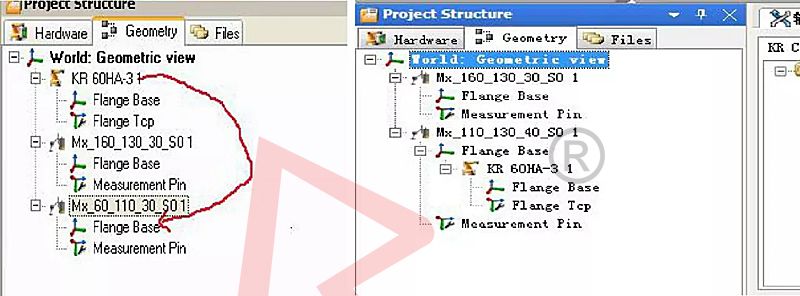
�D8
�D8�Γ����½�����Mx_110_130_40_S0����D9
�D9
����——���O(sh��)�Å���(sh��)——������——�����g������(sh��)�O(sh��)������D10��
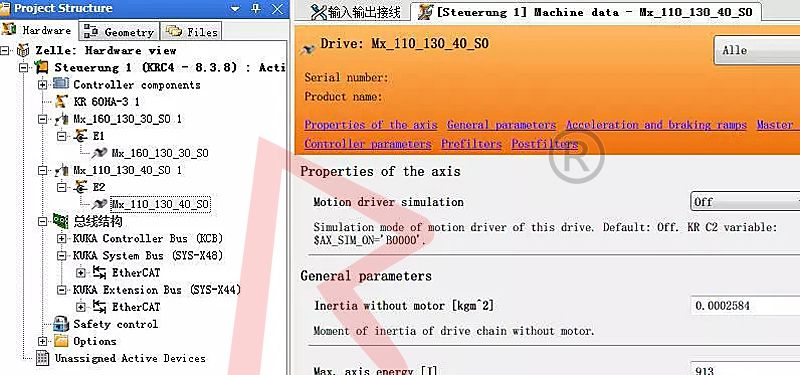
�D10
�D10����(sh��)��Ҫ����λ��늙C�D(zhu��n)�����S��������p�ٱȵȅ���(sh��)
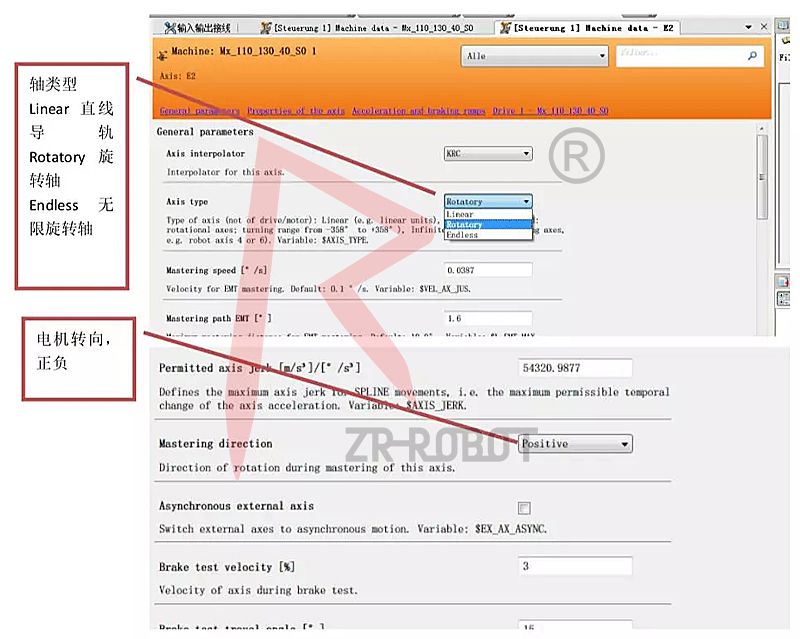
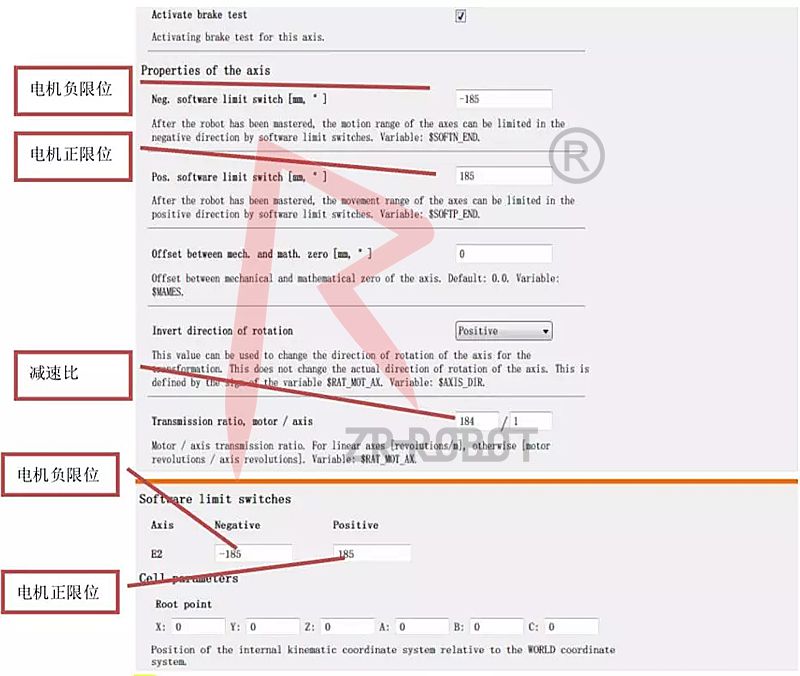
ע:�����Ҫ��������ͱ�회������D(zhu��n)�Qֵݔ���Mȥ����(sh��)ֵ�Ɍ��H�y���ó�
���D(zhu��n)�S���ú����沽�E��ͬ�������@��:��������KR60HA_3�ϵ�MX_60_110_30_S0��FLANGEBASE���棬��D8���@���������D(zhu��n)�S�r����Ҫ��(zh��)��:�ļ�/��䛹����������е��ļ�������߅�����F(xi��n)“��ȫ���õ�У�Ͳ����_”��������(zh��)��“����/��ȫ����”��